
-

使用众包反馈来帮助训练机器人
为了教人工智能代理一项新任务,比如如何打开厨房柜子,研究人员经常使用强化学习——这是一种试错过程,在该过程中,代理会因采取更接近目标的行动而获得奖励。在许多情况下,人类专家必须仔细设计奖励函数,这是一种激励机制,赋予代理人探索的动力。当智能体探索并尝试不同的动作时,人类专家必须迭代地更新奖励函数。这可能非常耗时、效率低下,并且难以扩展,尤其是当任务复杂且涉及许多步骤时。来自麻省理工学院、哈佛大学和华盛顿大学的研究人员开发了一种新的强化学习方法,该方法不依赖于专门设计的奖励函数...
作者:ROBOT@qwh 日期:2023.11.29 分类:机器人 1819 -

-

拆解 OpenAI 的新董事会
在人工智能和技术领域掀起波澜的惊人事件中,人工智能领域的领先实体 OpenAI 最近的领导地位发生了重大转变。以萨姆·奥尔特曼 (Sam Altman) 戏剧性地重返首席执行官职位以及随之而来的董事会改组为标志,这些变化代表了该组织的关键时刻。OpenAI 以其在人工智能研究和开发方面的开创性工作而闻名,包括广泛认可的 ChatGPT 和 DALL-E 模型,站在人工智能进步的最前沿。因此,董事会的重组不仅仅是人员的变动,还标志着人工智能领域最具影响力的组织之一的方向、优先事...
作者:airobotnews 日期:2023.11.23 分类:人工智能 1964 -
当机器人帮助完成任务时,人类会变得更懒吗?
“社交偷懒”是一种现象,当团队成员因为知道其他人会替他们工作而开始减少努力时就会发生。科学家们调查这种情况是否发生在机器人和人类结合工作的团队中,发现执行质量保证任务的人类在被告知机器人已经检查过一件物品时发现的错误较少,这表明他们依赖机器人并且较少关注工作。现在,技术的进步意味着一些机器人可以与人类一起工作,有证据表明,这些人类已经学会将它们视为队友,而团队合作可以对人们的表现产生消极和积极的影响。人们有时会放松,让同事做工作。这被称为“社交偷懒”,当人们知道自己的贡献不会...
作者:airobotnews 日期:2023.11.16 分类:机器人 897 -
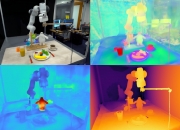
使用语言让机器人更好地掌握开放世界
想象一下,您正在国外拜访一位朋友,您查看了他们的冰箱,看看有什么可以做一顿丰盛的早餐。许多物品一开始对您来说都是陌生的,每一件物品都装在不熟悉的包装和容器中。尽管存在这些视觉上的区别,您还是开始了解每一种的用途,并根据需要选择它们。受人类处理不熟悉物体的能力的启发,麻省理工学院计算机科学与人工智能实验室 (CSAIL) 的一个团队设计了机器人操纵特征场 (F3RM),这是一个将 2D 图像与基础模型特征混合到 3D 场景中的系统,以帮助机器人识别并抓住附近的物品。F3RM可以...
作者:airobotnews 日期:2023.11.16 分类:人工智能 430 -

-
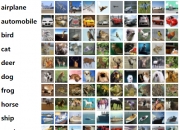
CIFAR-10--人工智能数据集
由 Krizhevsky 等人提出。从微小图像中学习多层特征CIFAR -10数据集(加拿大高级研究所,10 个类别)是 Tiny Images 数据集的子集,由 60000 张 32x32 彩色图像组成。这些图像标有 10 个相互排斥的类别之一:飞机、汽车(但不是卡车或皮卡车)、鸟、猫、鹿、狗、青蛙、马、船和卡车(但不是皮卡车)。每类有 6000 张图像,每类有 5000 张训练图像和 1000 张测试图像。判断图像是否属于某个类的标准如下:类名应该位于“这张图片...
作者:ROBOT@qwh 日期:2023.11.13 分类:人工智能 455 -
-

DevOps 中的 AI:简化软件部署和运营
就像一台运转良好的机器一样,您的组织正处于重大软件部署的边缘。您已经在尖端人工智能解决方案上投入了大量资金,您的数字化转型战略已经制定,并且您的目光坚定地瞄准了未来。然而,问题迫在眉睫——您能否真正利用人工智能的力量来简化软件部署和运营?到 2027 年,全球数字化转型市场规模将达到惊人的15,489 亿美元,复合年增长率为 21.1%,您不能只是原地踏步。 随着新兴的DevOps 趋势重新定义软件开发,公司利用先进的功能来加速人工智能的采用。这就是为什么,您需要拥...
作者:ROBOT@qwh 日期:2023.11.01 分类:人工智能 468

热门文章
-
康普顿未来智慧农场
 康普顿未来农场,使用更少的水和1%的土地,即可实现与产统农业相同产量....
康普顿未来农场,使用更少的水和1%的土地,即可实现与产统农业相同产量.... -
拆解 OpenAI 的新董事会
在人工智能和技术领域掀起波澜的惊人事件中,人工智能领域的领先实体 OpenAI 最近的领导地位发生了重大转变。以萨姆·奥尔特曼 (Sam Altman) 戏剧性地重返首席执行官职位以及随之而来的董事会改组为标志,这些变化代表了该组织的关键时刻。OpenAI 以其在人工智能研究和开发方面的开创性工作而闻名,包括广泛认可的 ChatGPT 和 DALL-E 模型,站在人工智能进步的最前沿。因此,董事会的重组不仅仅是人员的变动,还标志着人工智能领域最具影响力的组织之一的方向、优先事... -
一种自动确定计算机游戏状态中可能动作的方法
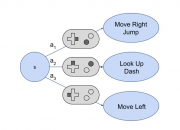 由于手动彻底测试视频游戏软件非常困难,因此需要拥有能够自动探索不同游戏功能的人工智能代理。此类代理的关键要求是玩家动作的模型,代理可以使用该模型来确定不同游戏状态下的可能动作集,以及对代理策略选择的游戏执行选定的动作。目前使用的典型游戏引擎不提供这样的动作模型,导致现有的工作要么需要人工手动定义动作模型,要么不精确地猜测可能的动作。在我们的工作中,我们通过为游戏中存在的用户输入处理逻辑开发最先进的分析方法来演示程序分析如何有效解决该问题,该分析可以使用离散动作空间自动建模游戏...
由于手动彻底测试视频游戏软件非常困难,因此需要拥有能够自动探索不同游戏功能的人工智能代理。此类代理的关键要求是玩家动作的模型,代理可以使用该模型来确定不同游戏状态下的可能动作集,以及对代理策略选择的游戏执行选定的动作。目前使用的典型游戏引擎不提供这样的动作模型,导致现有的工作要么需要人工手动定义动作模型,要么不精确地猜测可能的动作。在我们的工作中,我们通过为游戏中存在的用户输入处理逻辑开发最先进的分析方法来演示程序分析如何有效解决该问题,该分析可以使用离散动作空间自动建模游戏... -
使用众包反馈来帮助训练机器人
为了教人工智能代理一项新任务,比如如何打开厨房柜子,研究人员经常使用强化学习——这是一种试错过程,在该过程中,代理会因采取更接近目标的行动而获得奖励。在许多情况下,人类专家必须仔细设计奖励函数,这是一种激励机制,赋予代理人探索的动力。当智能体探索并尝试不同的动作时,人类专家必须迭代地更新奖励函数。这可能非常耗时、效率低下,并且难以扩展,尤其是当任务复杂且涉及许多步骤时。来自麻省理工学院、哈佛大学和华盛顿大学的研究人员开发了一种新的强化学习方法,该方法不依赖于专门设计的奖励函数... -
HierSpeech++:通过零样本语音合成新架构
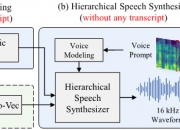 基于大语言模型(LLM)的语音合成已广泛应用于零样本语音合成中。然而,它们需要大规模数据,并且具有与以前的自回归语音模型相同的局限性,包括推理速度慢和缺乏鲁棒性。本文提出了 HierSpeech++,一种快速、强大的零样本语音合成器,用于文本到语音(TTS)和语音转换(VC)。我们验证了分层语音合成框架可以显着提高合成语音的鲁棒性和表现力。此外,即使在零样本语音合成场景中,我们也显着提高了合成语音的自然度和说话人相似度。对于文本到语音,我们采用文本到向量框架,该框架根据文本表...
基于大语言模型(LLM)的语音合成已广泛应用于零样本语音合成中。然而,它们需要大规模数据,并且具有与以前的自回归语音模型相同的局限性,包括推理速度慢和缺乏鲁棒性。本文提出了 HierSpeech++,一种快速、强大的零样本语音合成器,用于文本到语音(TTS)和语音转换(VC)。我们验证了分层语音合成框架可以显着提高合成语音的鲁棒性和表现力。此外,即使在零样本语音合成场景中,我们也显着提高了合成语音的自然度和说话人相似度。对于文本到语音,我们采用文本到向量框架,该框架根据文本表...
