
康普顿未来农场,使用更少的水和1%的土地,即可实现与产统农业相同产量....
康普顿未来农场,使用更少的水和1%的土地,即可实现与产统农业相同产量.
版权声明
本文仅代表作者观点,不代表本网站立场。
本文系作者授权本网站发表,未经许可,不得转载。
上一篇:拆解 OpenAI 的新董事会 下一篇:使用众包反馈来帮助训练机器人
康普顿未来农场,使用更少的水和1%的土地,即可实现与产统农业相同产量.
本文仅代表作者观点,不代表本网站立场。
本文系作者授权本网站发表,未经许可,不得转载。

新的SoftFoot Pro仿生脚原型是一种无运动、灵活的假肢脚,灵感来自人类四肢的解剖结构,由热那亚的意大利理工学院与比萨大学合作设计.它的设计在国际上是独一无二的,旨在为残疾人提供灵活的技术假肢,并为未来的人形机器人提供解决方案。...

三菱公司因最快解决魔方的机器人而荣获吉尼斯世界纪录称号。该机器人的时间为 0.305 秒,打破了之前的 0.38 秒纪录。...
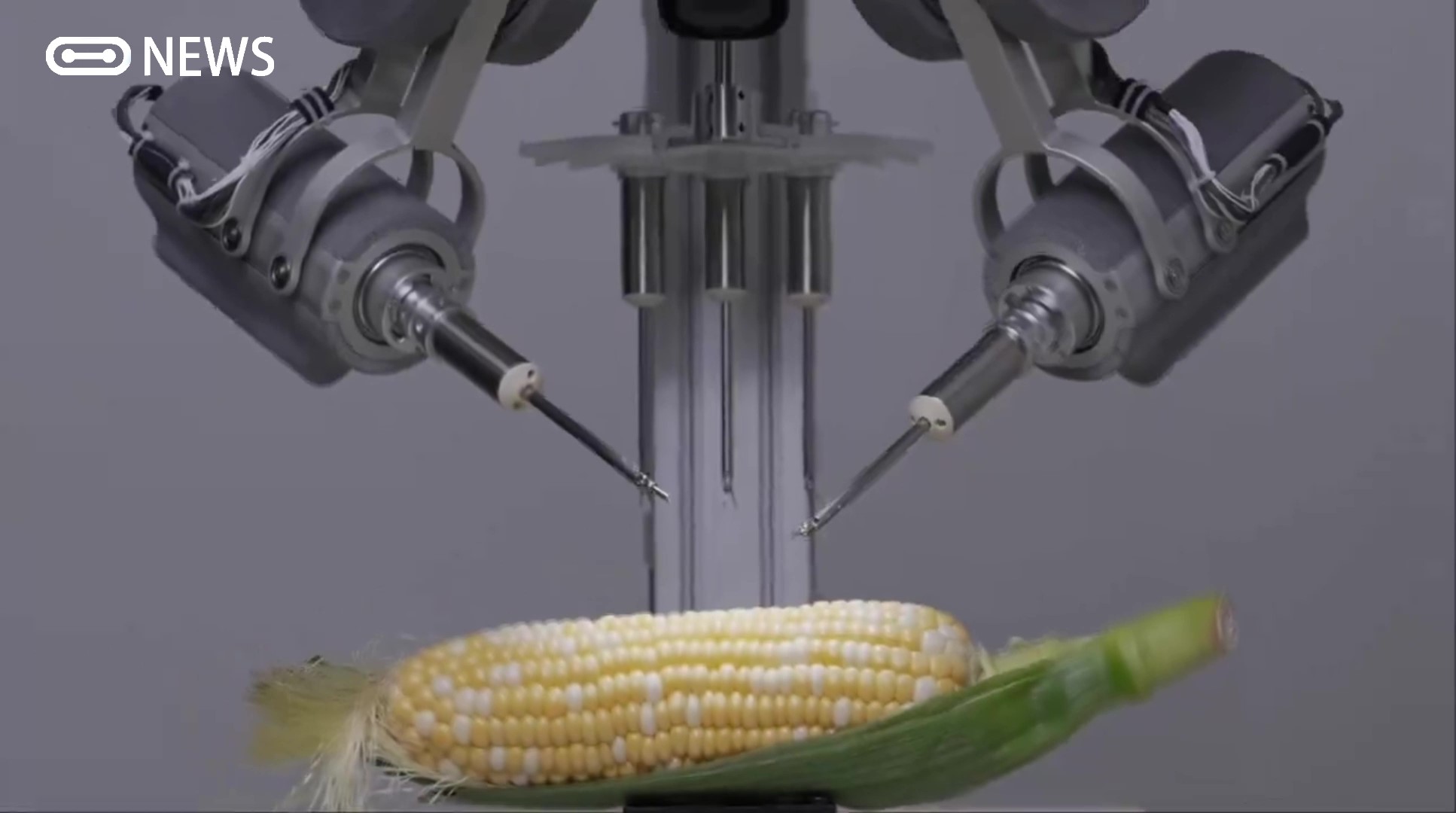
索尼开发了一种机器人,可以利用显微镜和高灵敏度的控制装置来跟踪外科医生的手部动作,并对静脉和神经等小组织进行精细的手术。...
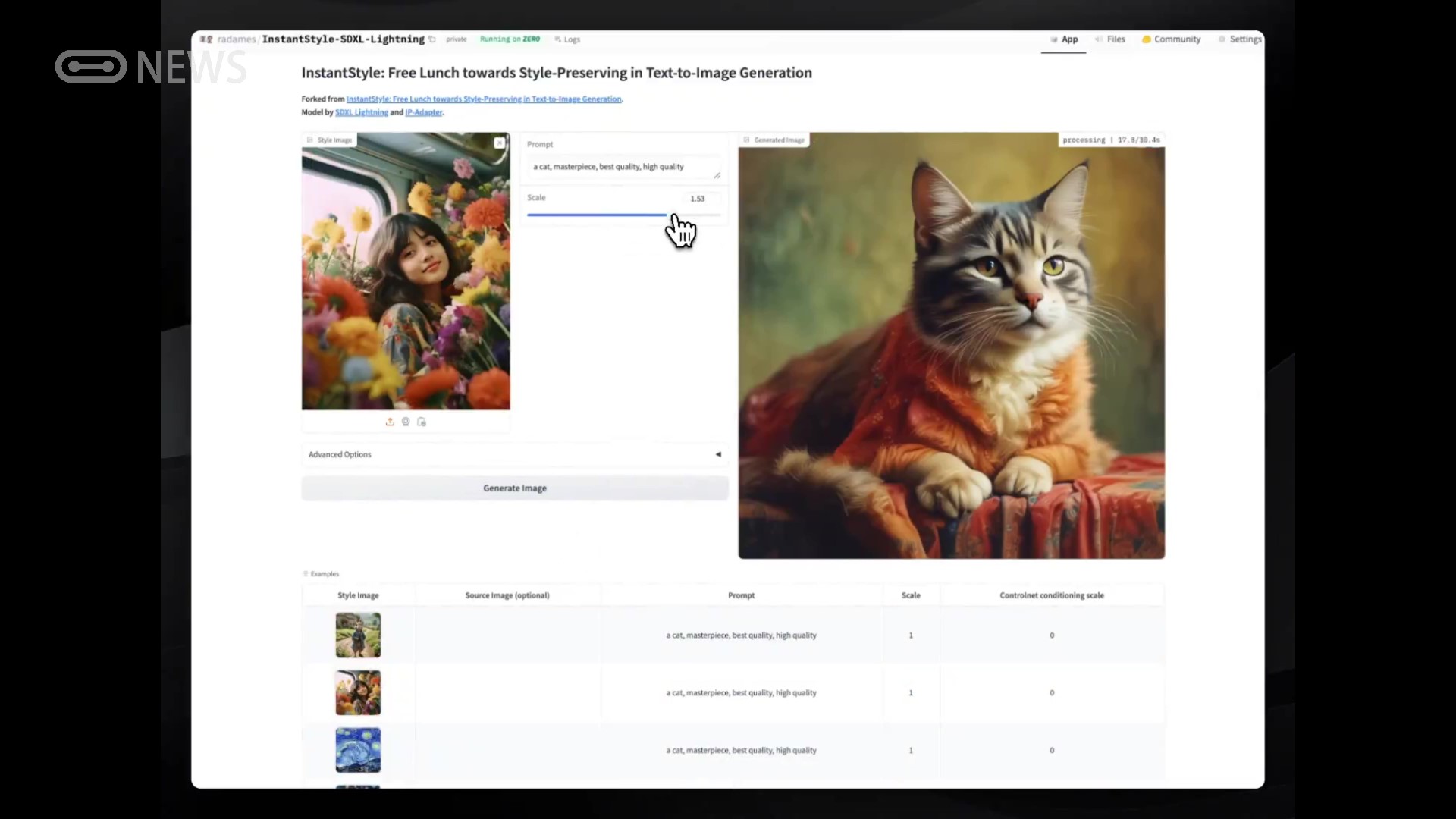
从文本生成与样例图像风格一致的图像。Llama3免费使用:https://huggingface.co/spaces/radames/InstantStyle-SDXL-Lightning...

在移动机器人领域,准确估计机器人的位置和方向对于成功导航和控制至关重要。用于实现此目的的一种常用技术是计算里程计。里程计是通过分析车轮运动和旋转来估计机器人位置和方向(或统称为姿势)的过程。在本文中,我们将主要关注移动机器人,并且本文建立在坐标变换的先验知识的基础上,这些知识将用于在探索环境时推导更新的机器人姿势。了解里程计里程计(也称为航位推算) 的原理是,轮式机器人行驶的距离可以通过测量其轮子的旋转来确定。通过测量每个轮子的旋转运动并应用运动学方程,可以估计机器...

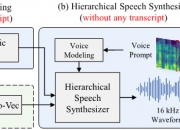
微软公司最近推出了一种基于单一静态图像和语音音频剪辑的具有视觉情感技能(VAS)的虚拟人物逼真说话脸生成框架VASA。模型VASA-1不仅能够产生与音频同步的嘴唇动作,而且还能够捕捉到大量的面部细微差别和自然的头部动作,从而有助于感知真实性和活力。核心创新包括在面部潜在空间中工作的整体面部动力学和头部运动生成模型,以及利用视频开发这种具有表现力和解纠缠性的面部潜在空间。通过广泛的实验,包括对一组新指标的评估,我们表明我们的方法在各个方面都明显优于以前的方法。我们的方法不仅提供...




发表评论